Welcome to my portfolio
I amGenisI am Genis
Passionate about building intelligent systems that perceive and interact with the world. Specializing in computer vision, autonomous navigation, and robotics software development.

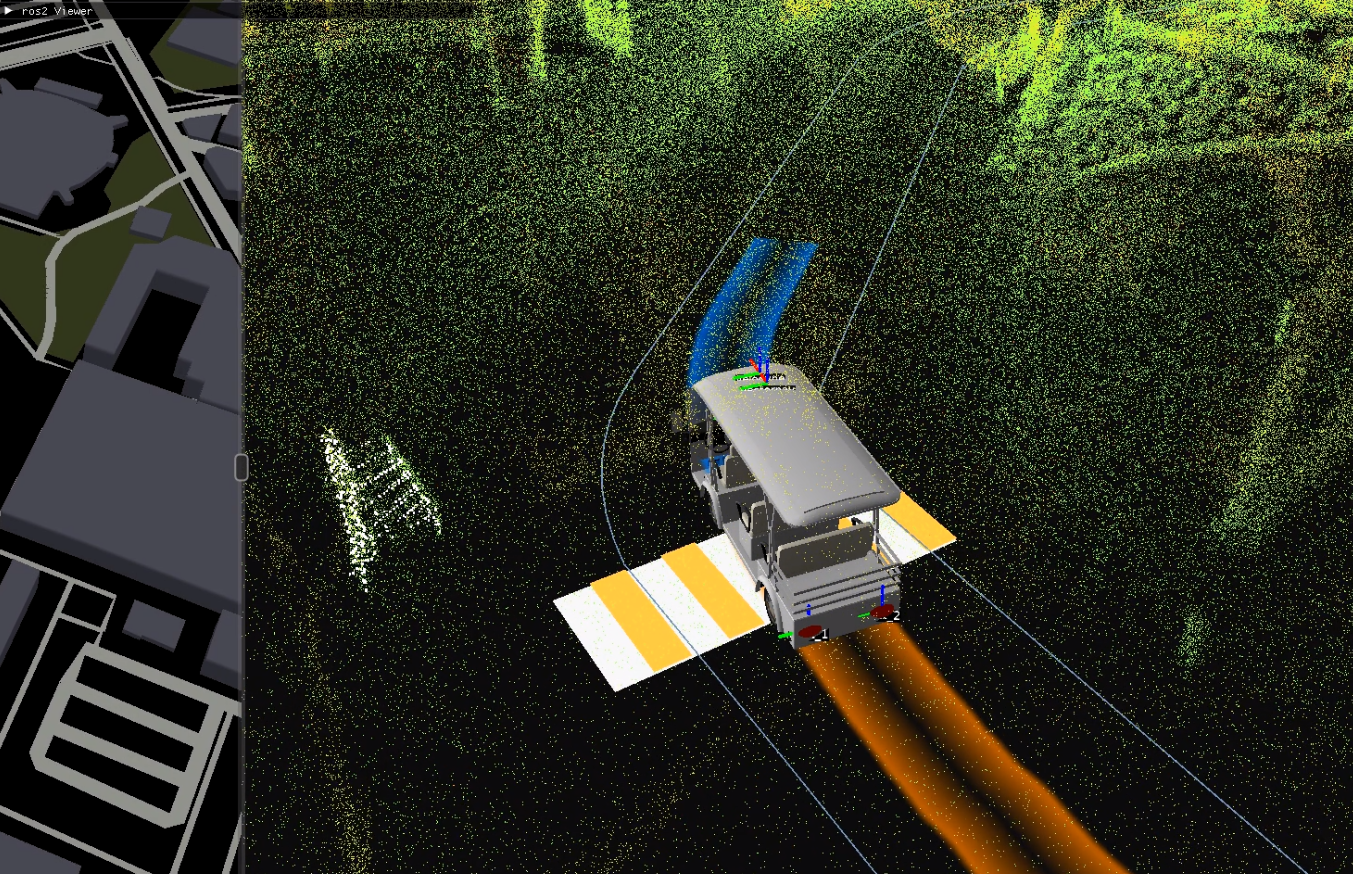
Autonomous Shuttle Vehicle
Advanced autonomous vehicle system with real-time navigation and obstacle detection capabilities.
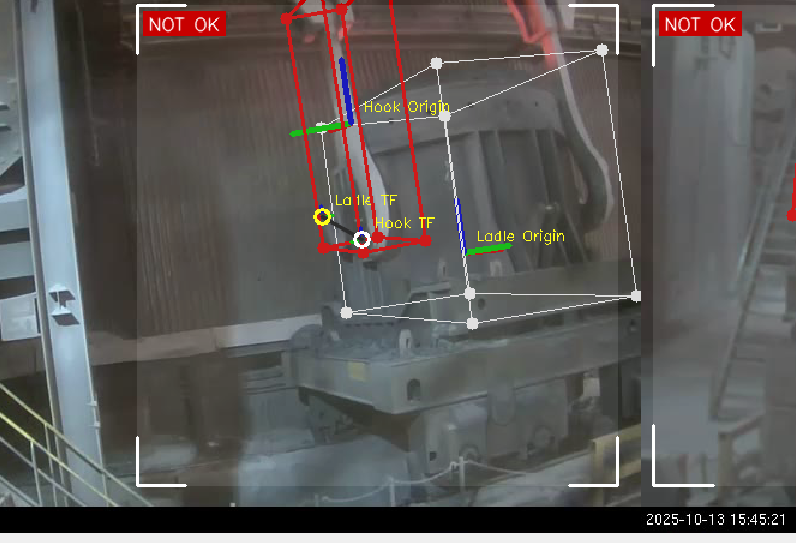
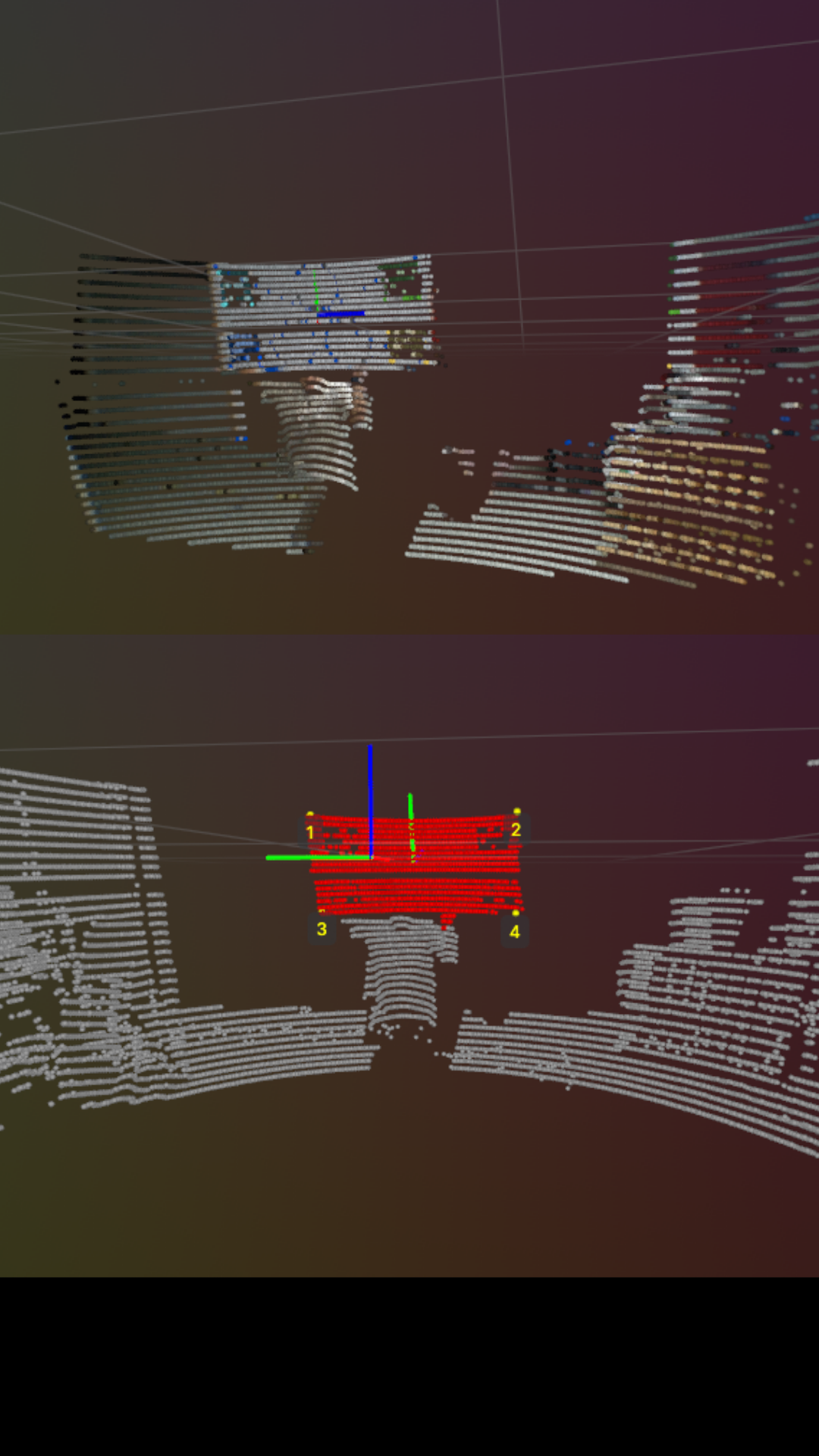
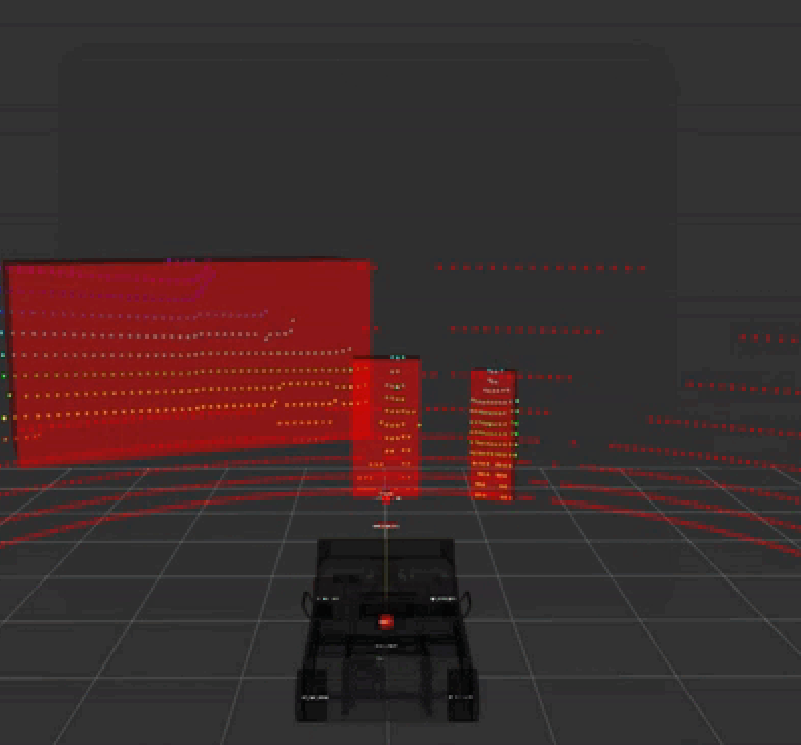
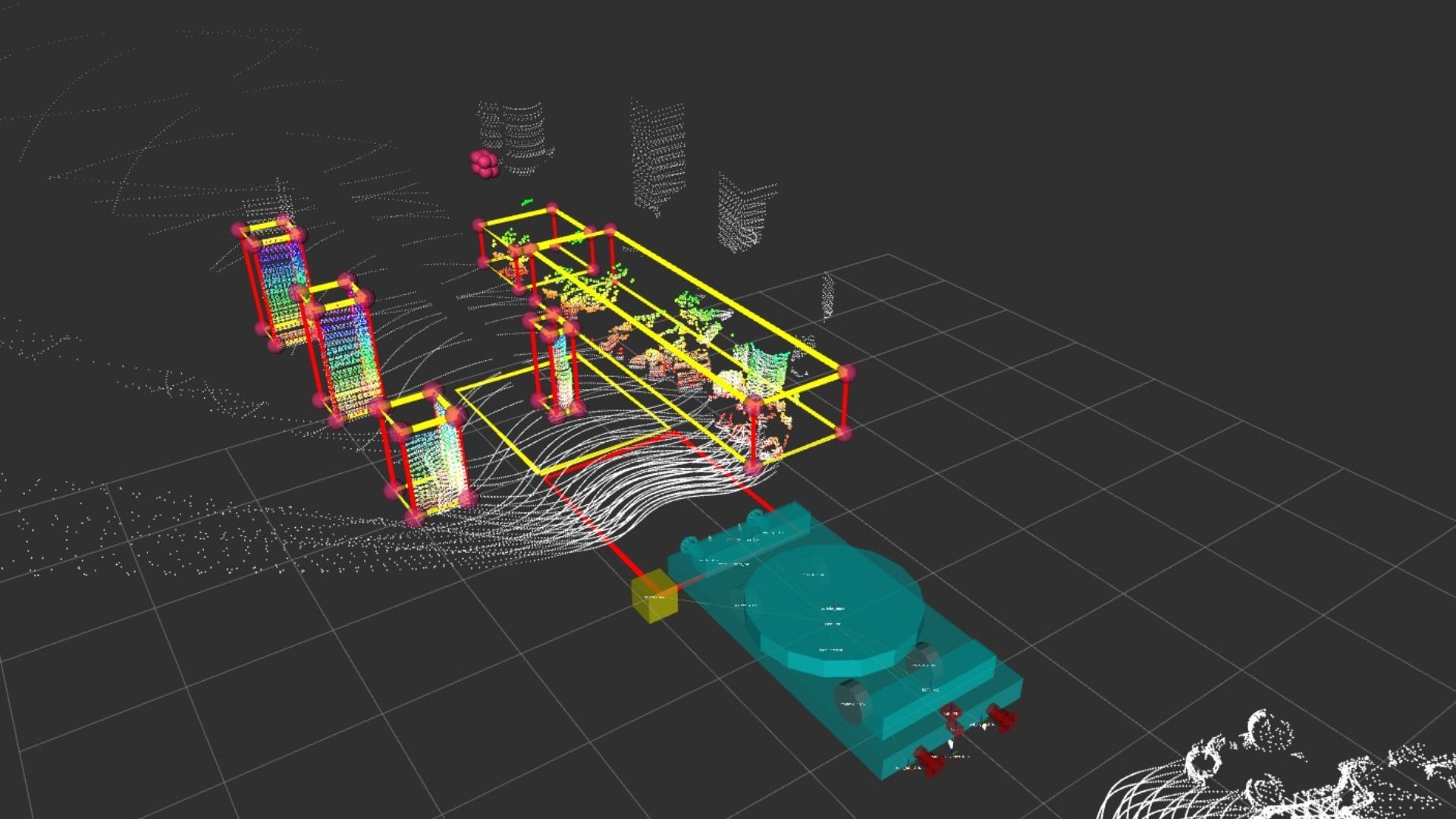
Visual Coupling Guard
Dual-approach 6DOF pose estimation system for industrial safety and digital twin synchronization in steel mills.
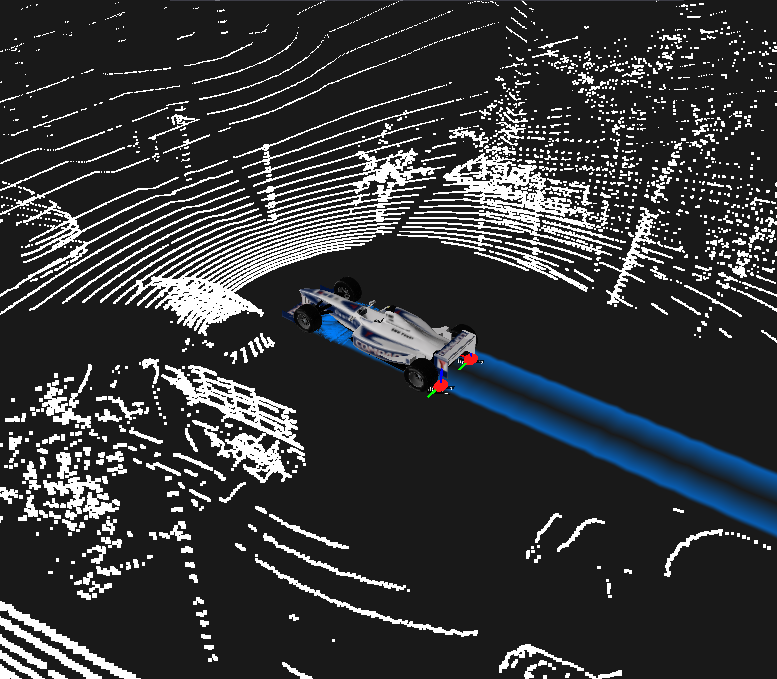
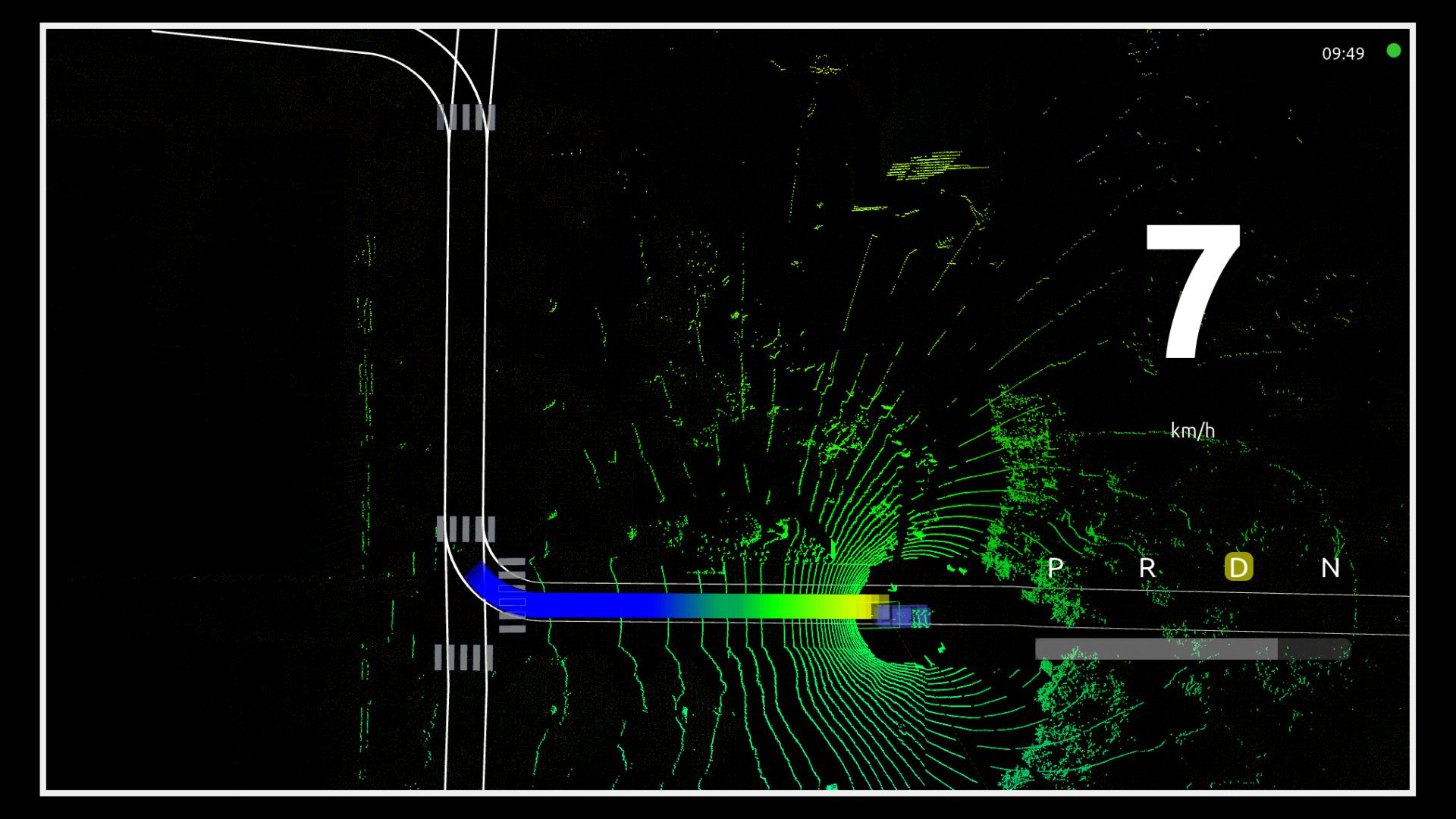
DistroPoint semantic segmentation model
A lightweight LiDAR model for real-time 32/64-beam semantic segmentation.
open-gl robotics visualization
Real-time 3D visualization system for robotics data using OpenGL rendering techniques.
LiDAR–Camera Extrinsic Calibration
LiDAR–camera calibration pipeline estimating extrinsics from a planar ArUco board via SVD-based rigid alignment.

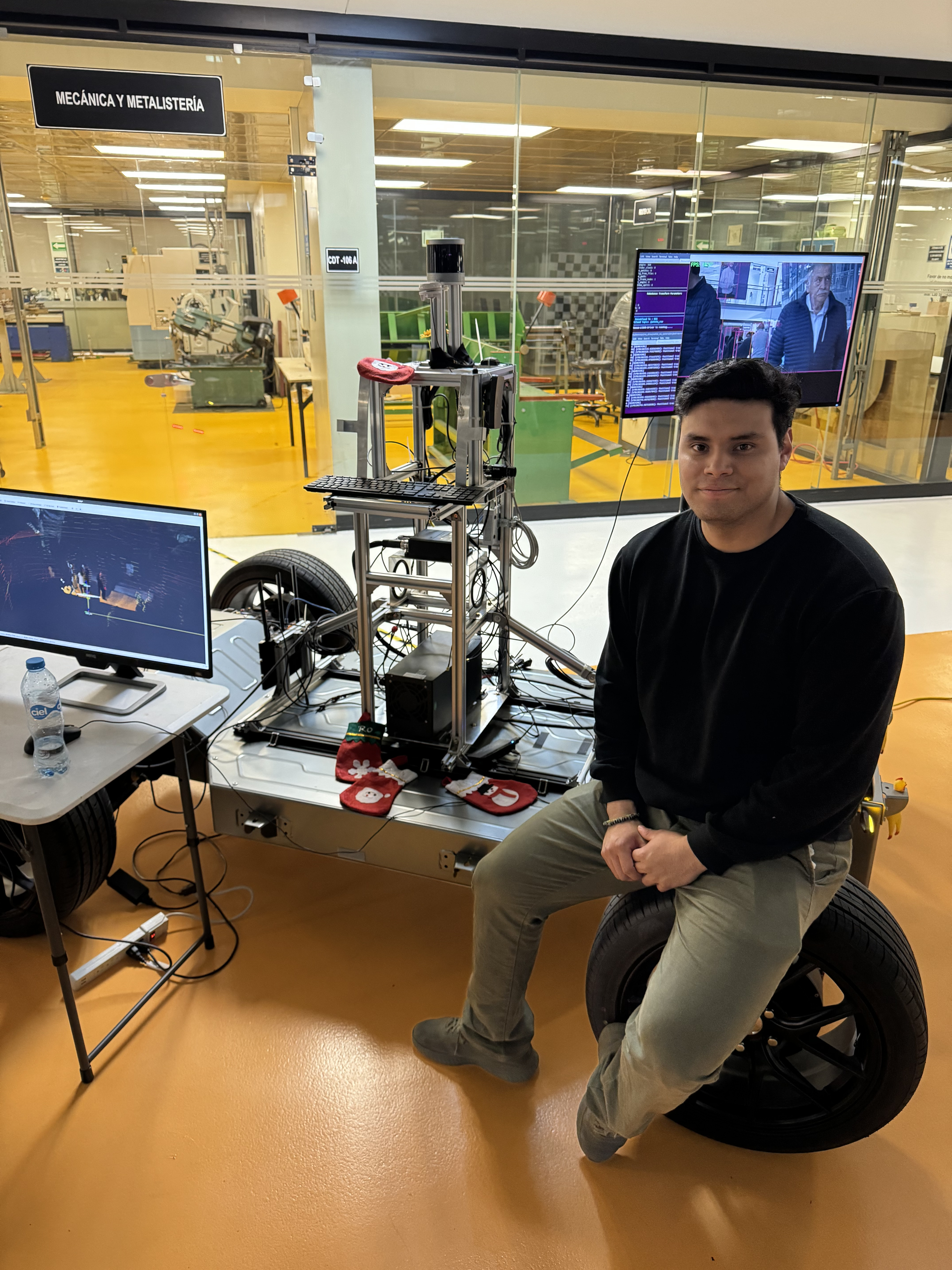
Autonomous platform Vehicle
Modular autonomous platform designed for research and development in robotics applications.
6DOF Pose Estimation Datasets datasets generation
Toolkit for generating 6DOF pose estimation datasets.
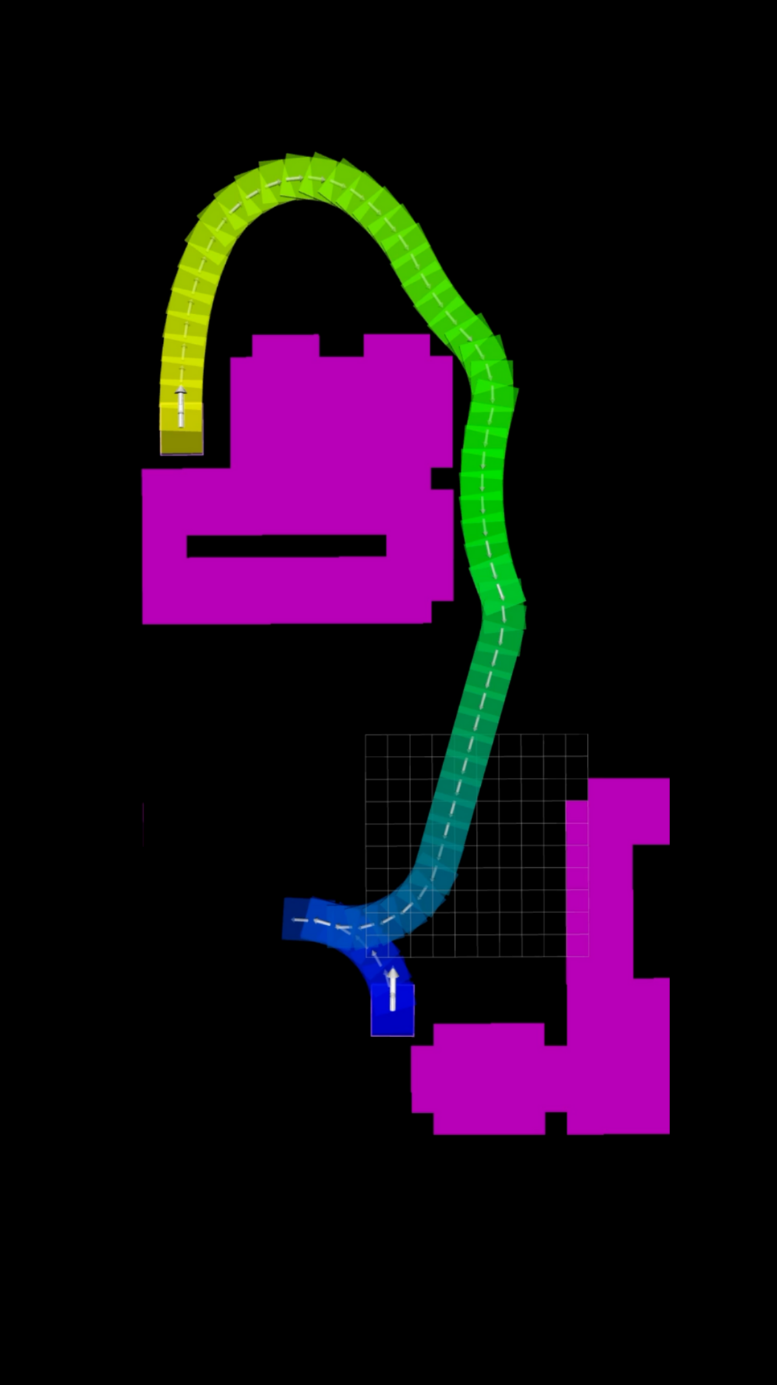
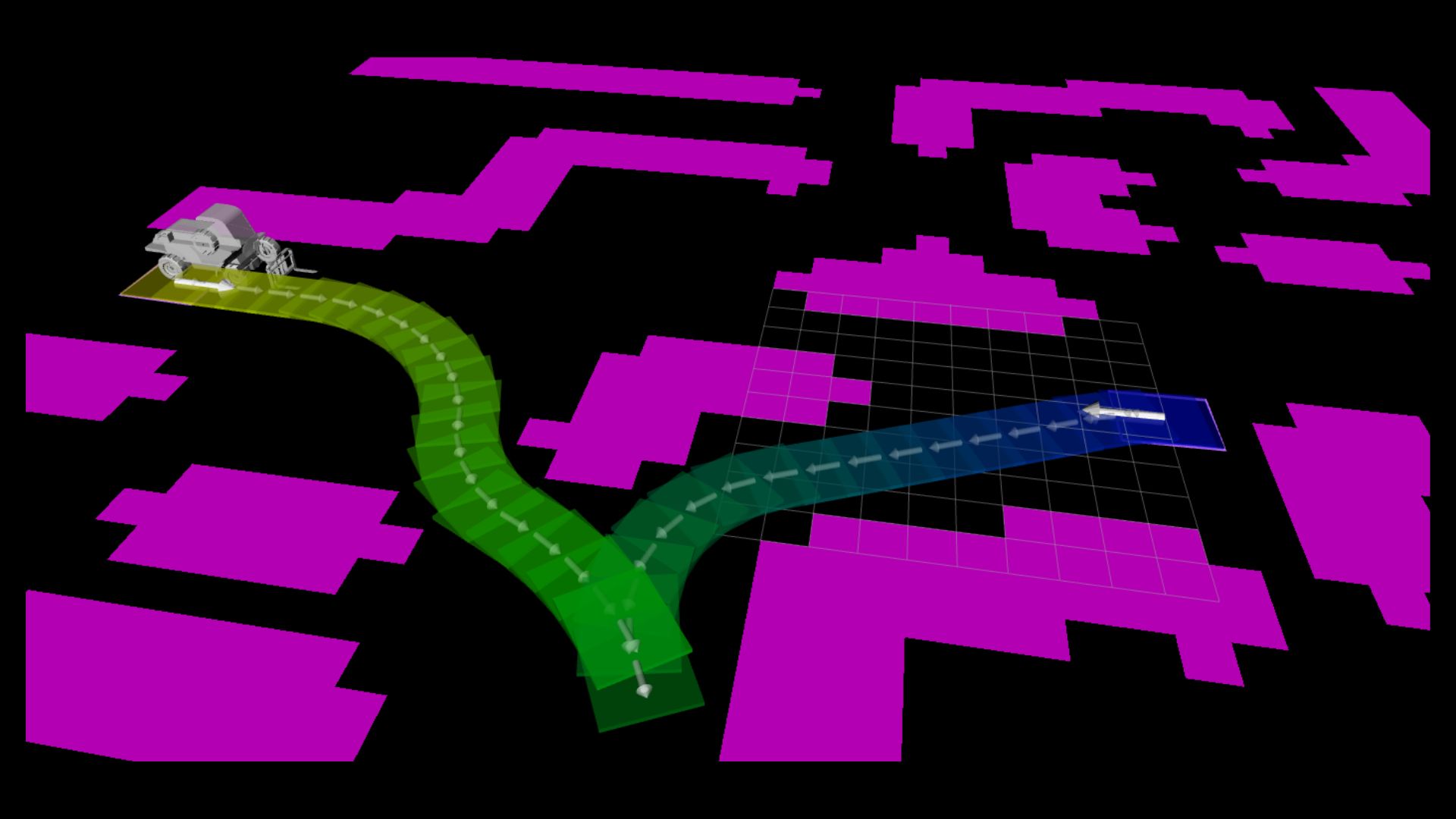
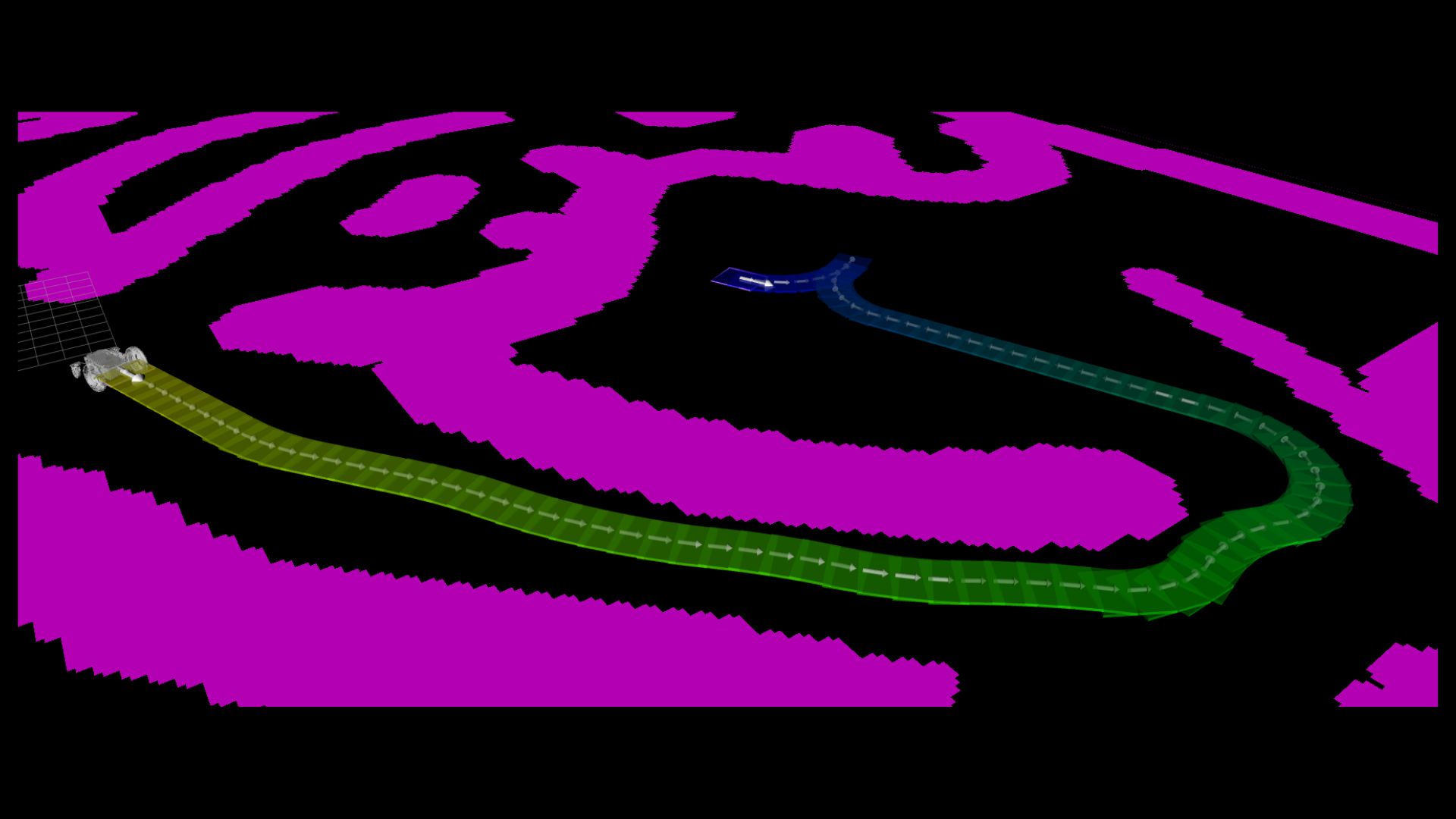
Autonomous Parking System
Dual-mode autonomous parking system with Reeds-Shepp and Dubins Hybrid A* algorithms for optimal path planning.
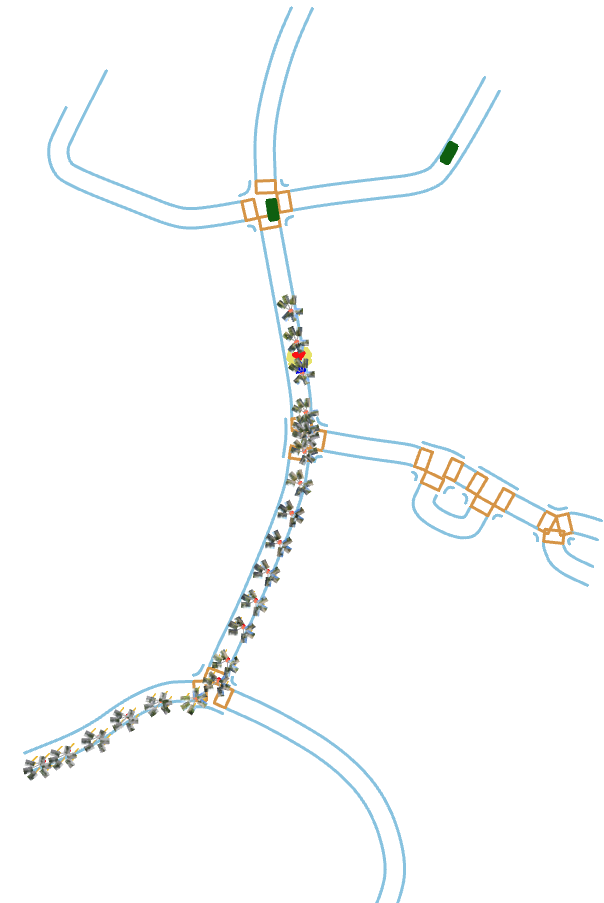
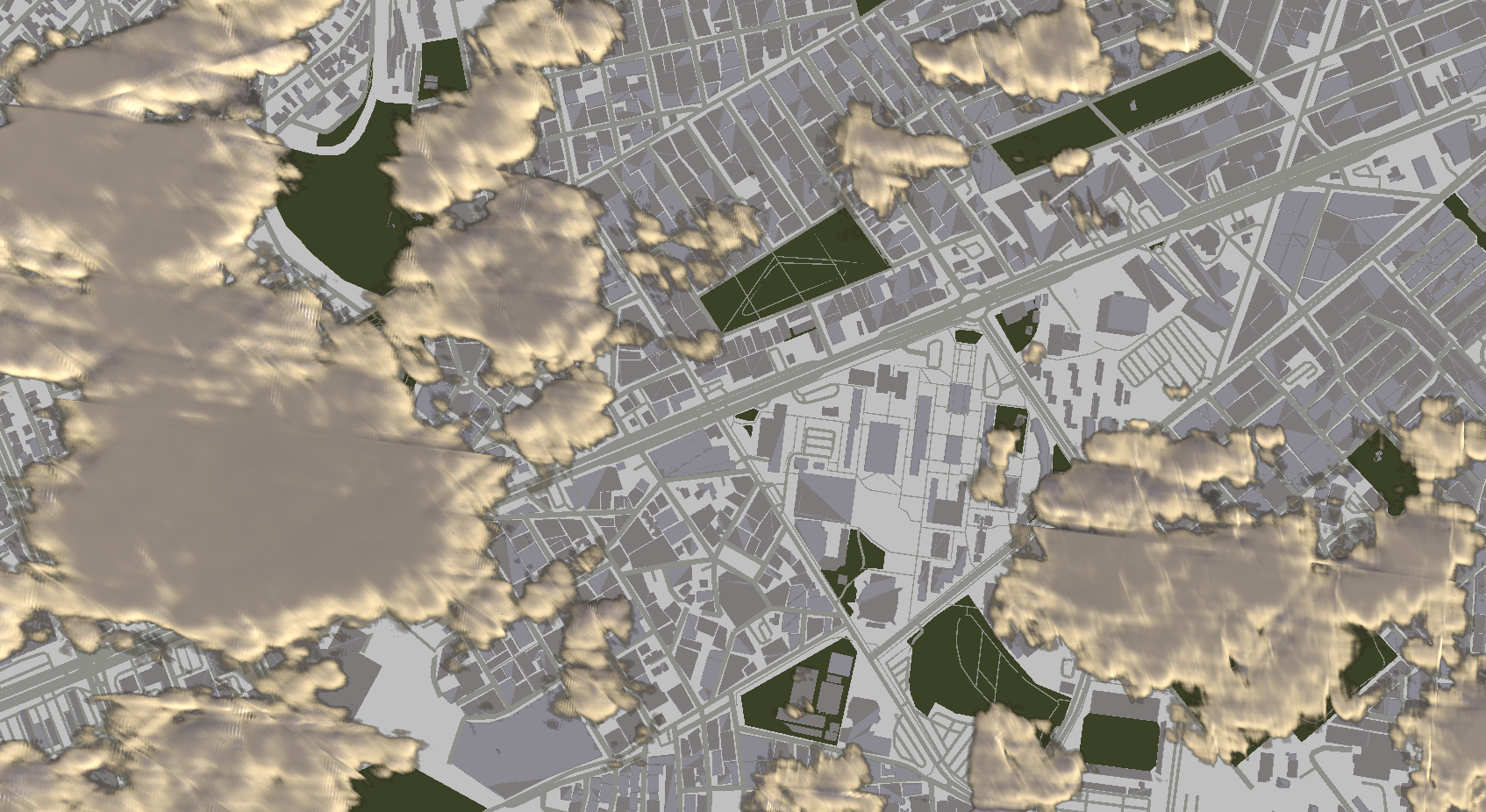
Synthetic AV Data Generation Pipeline
AV environments generator from any GPS location worldwide
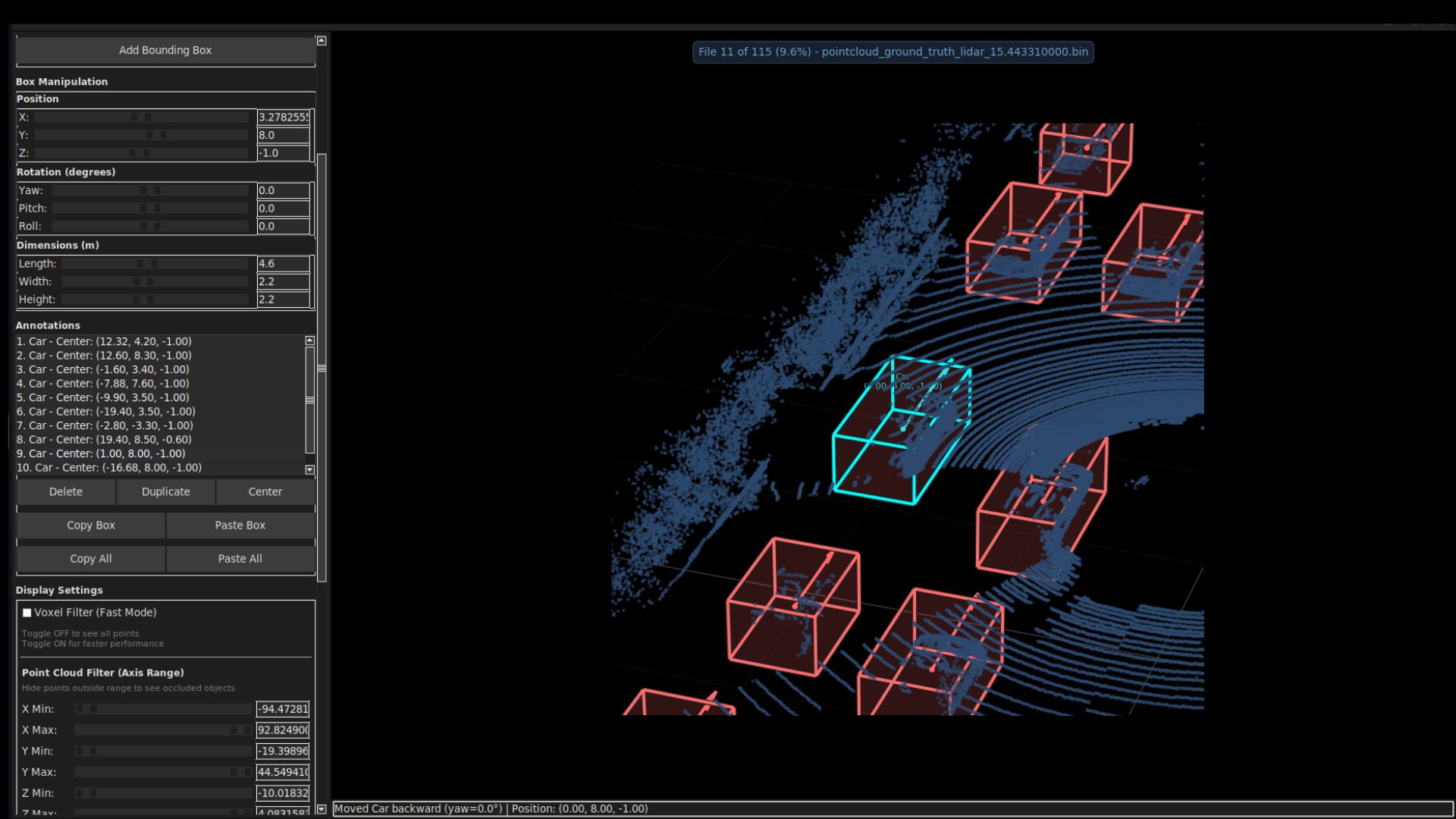
LiDAR 3D Annotation Suite
Interactive 3D LiDAR annotation tool for generating KITTI-format training labels for autonomous driving.
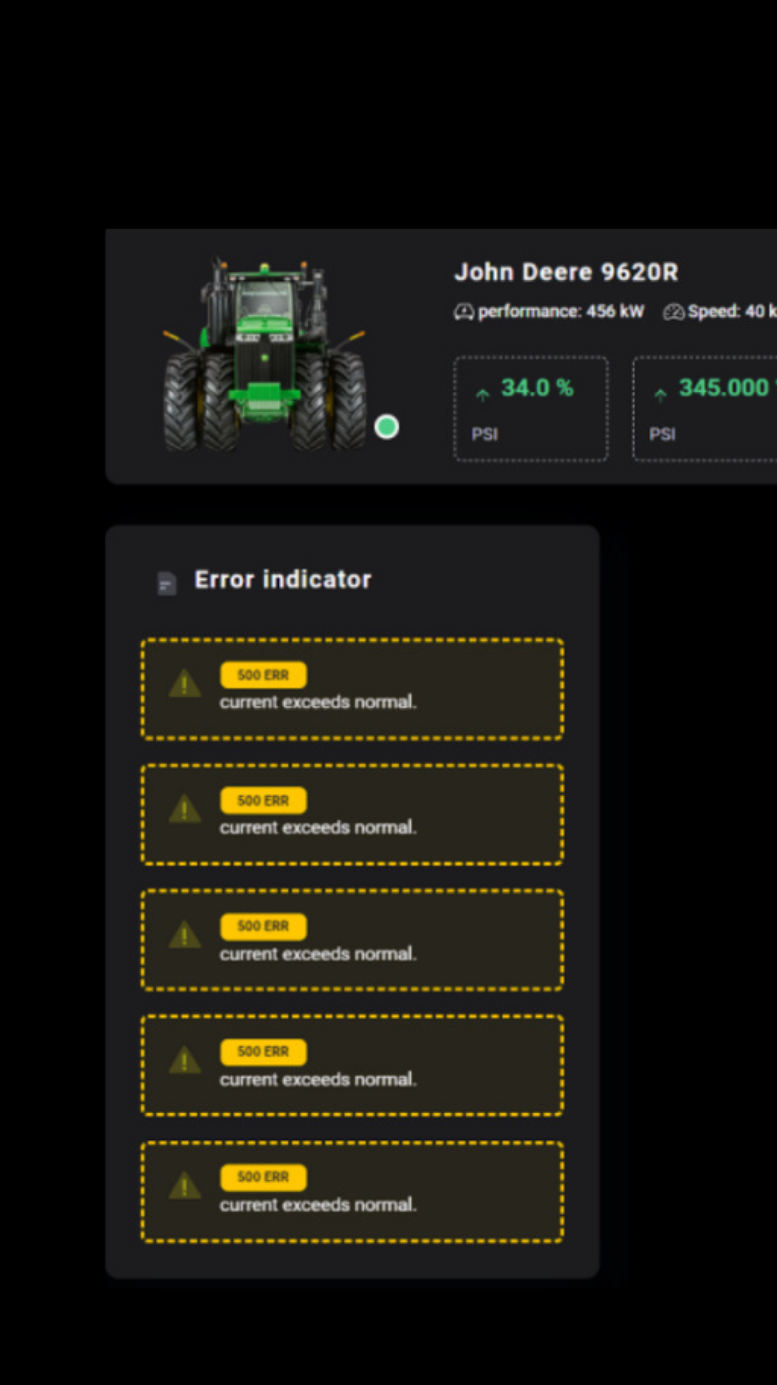
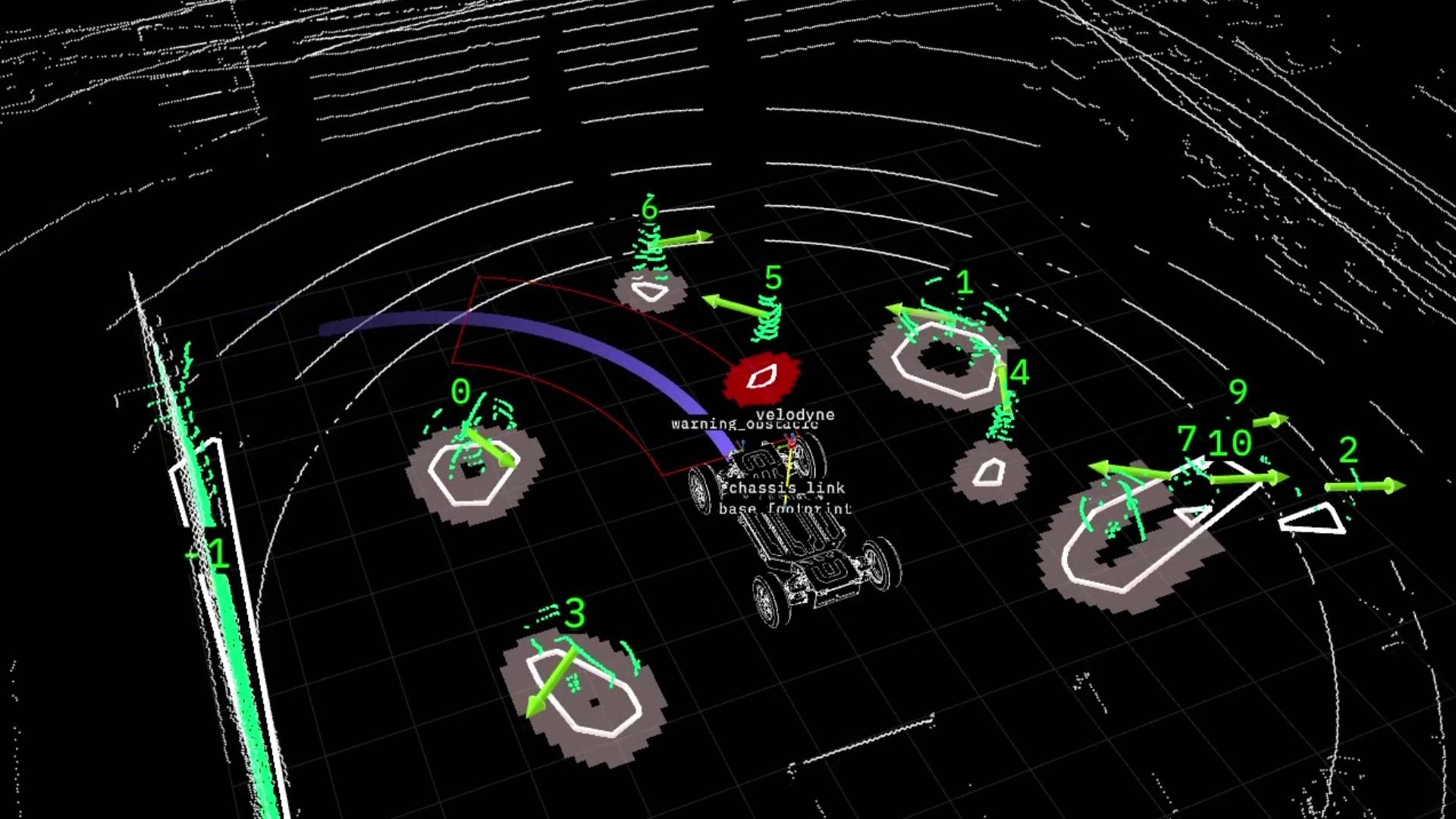
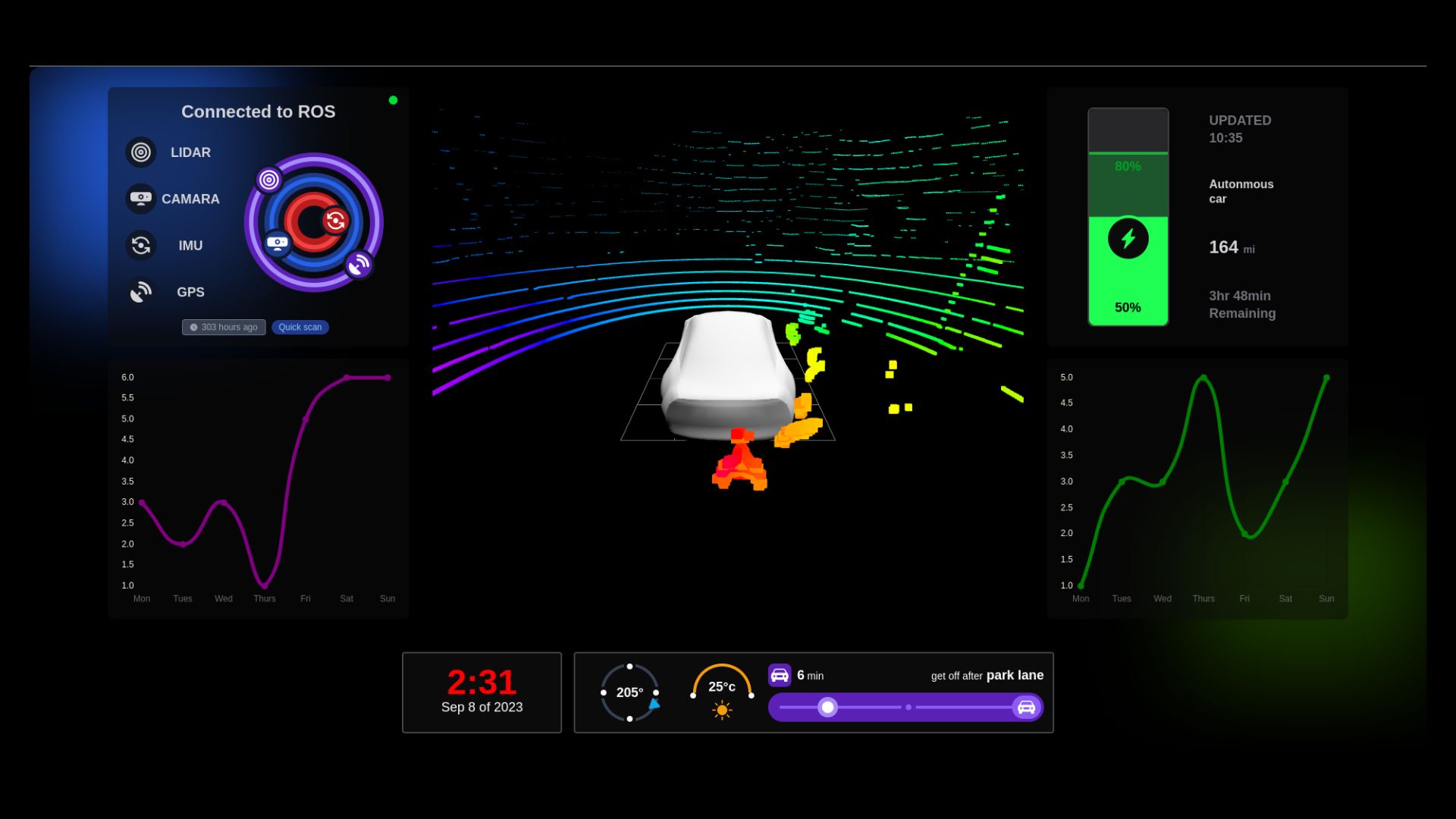
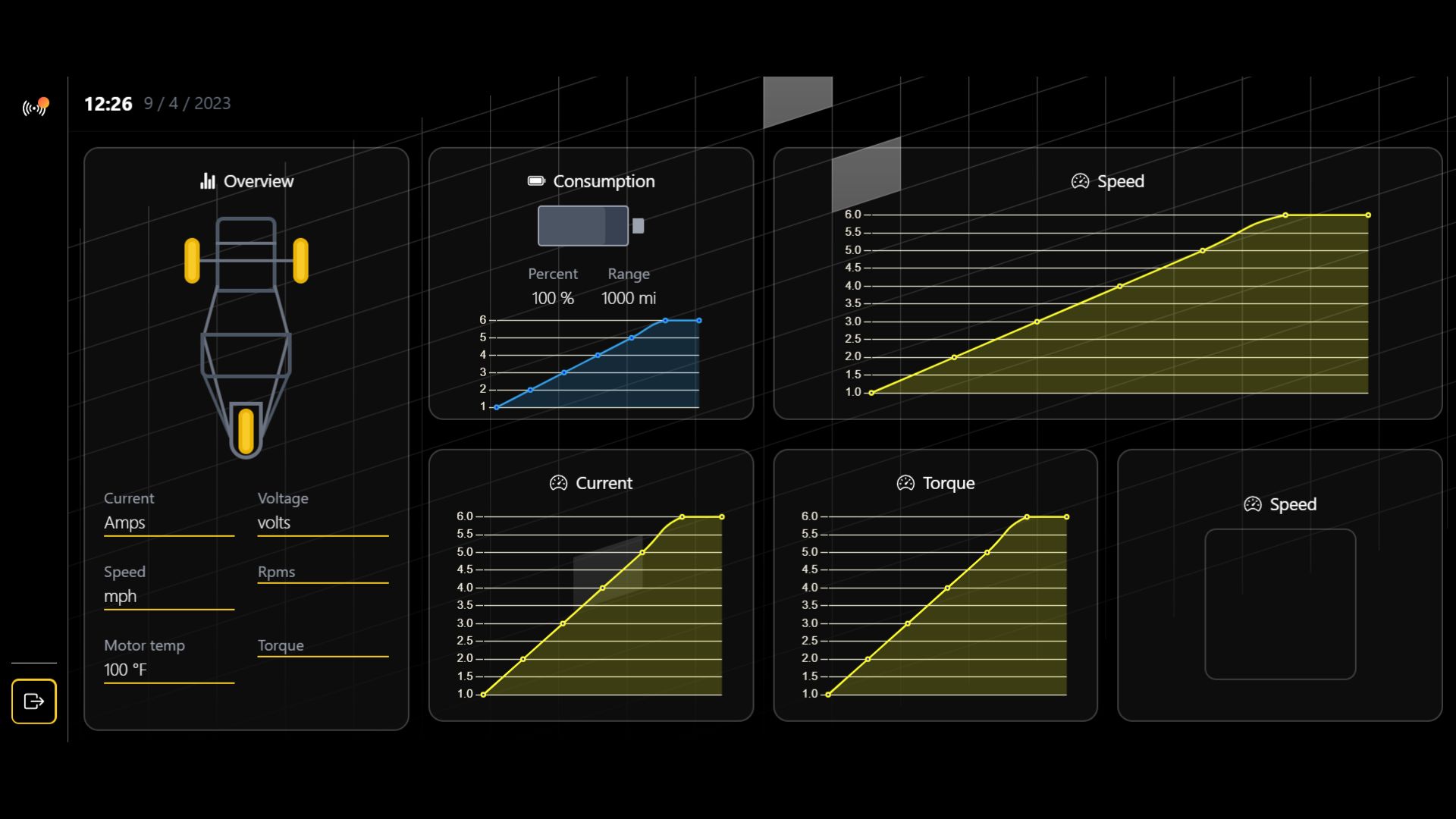
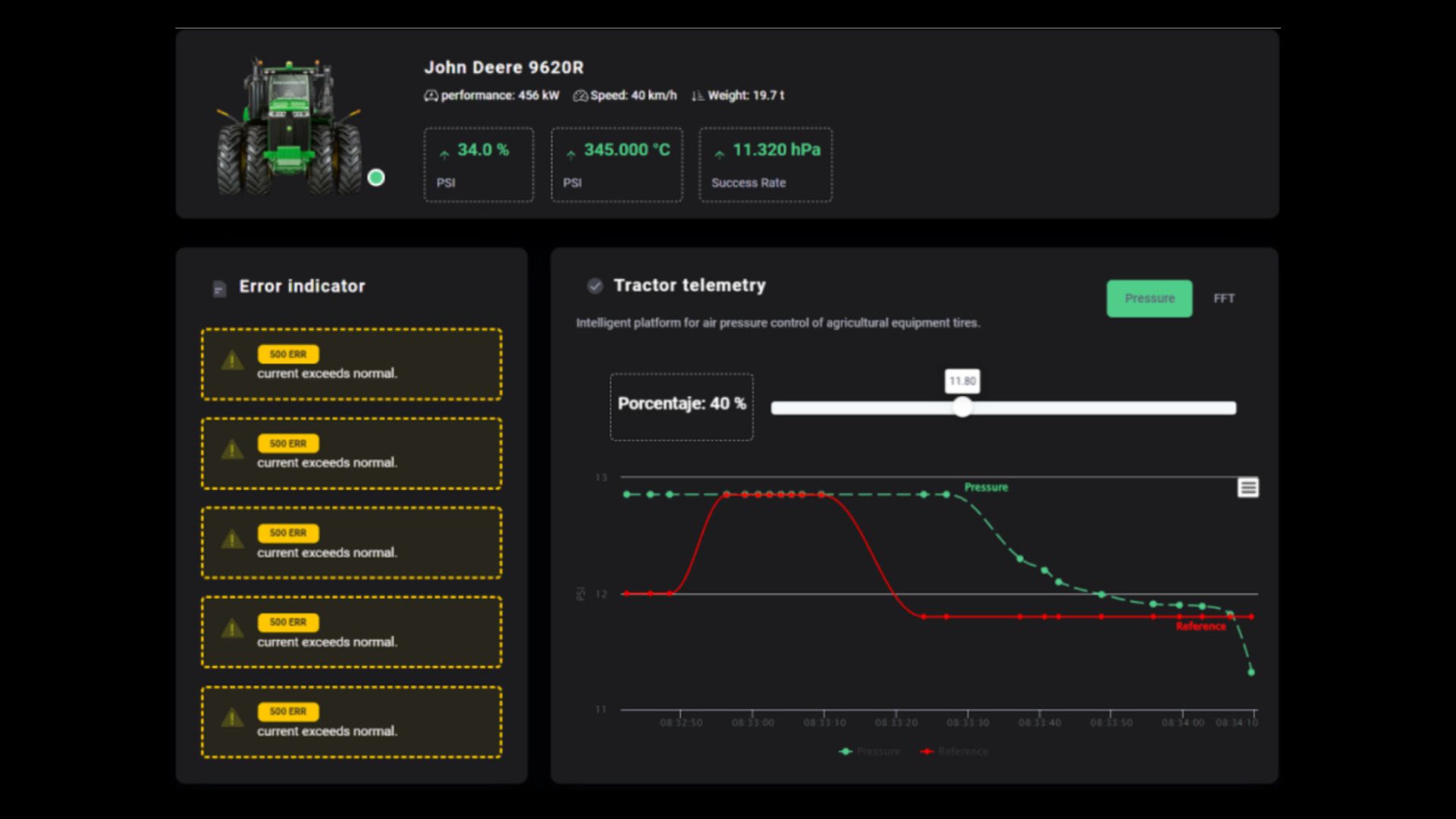
Telemetry and Monitoring Systems
Telemetry and monitoring systems real-time data collection and analysis.
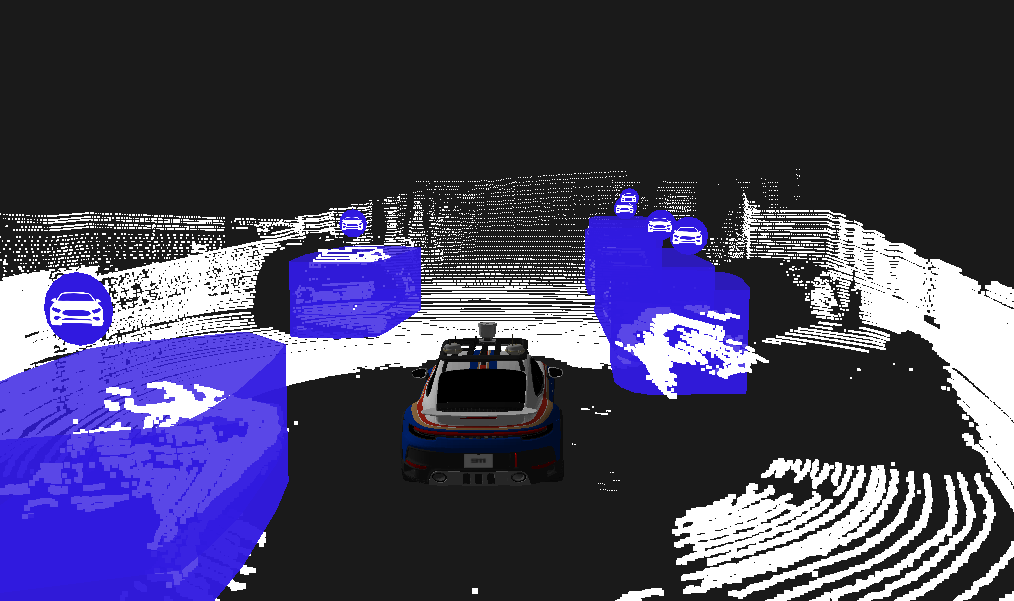
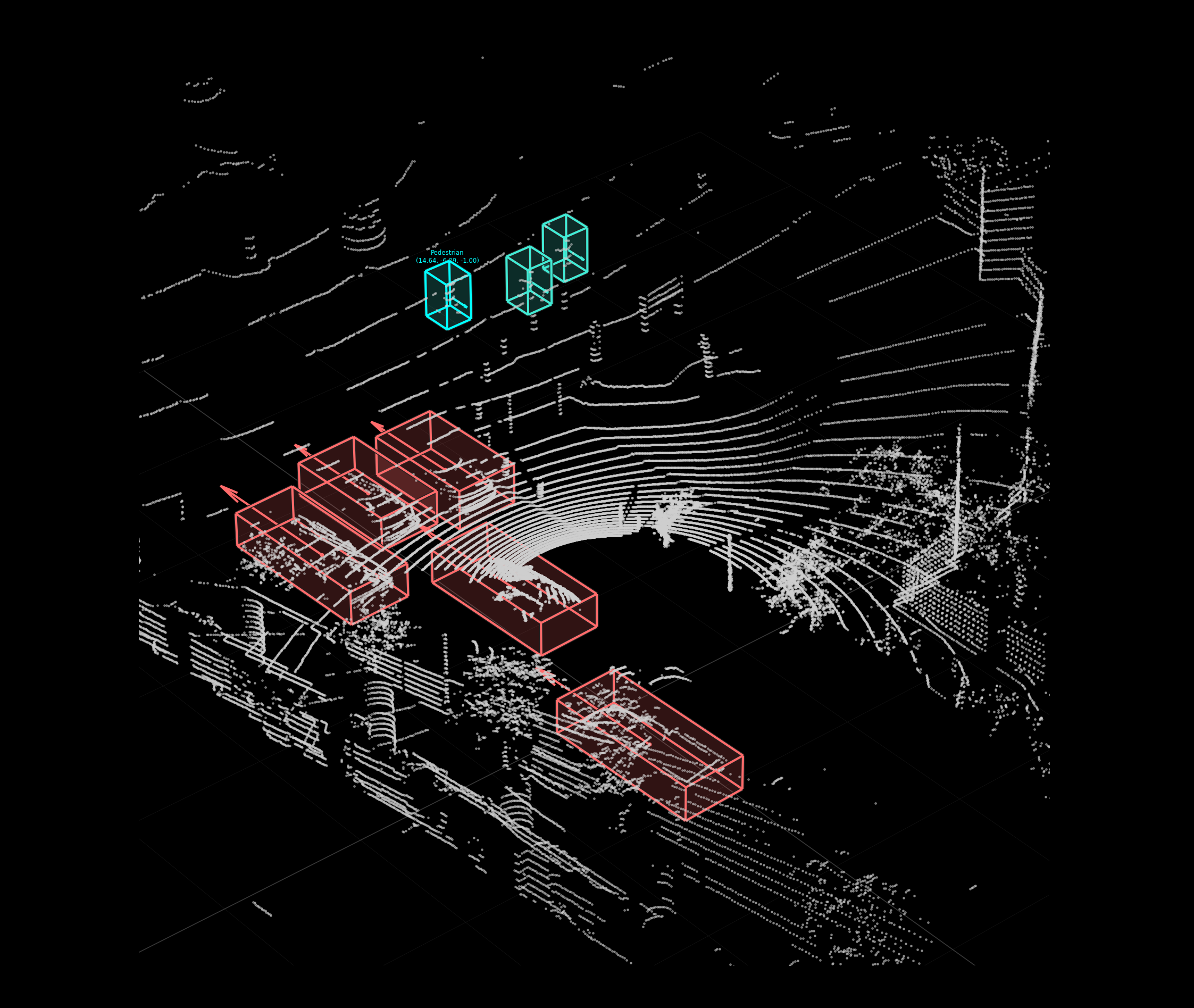
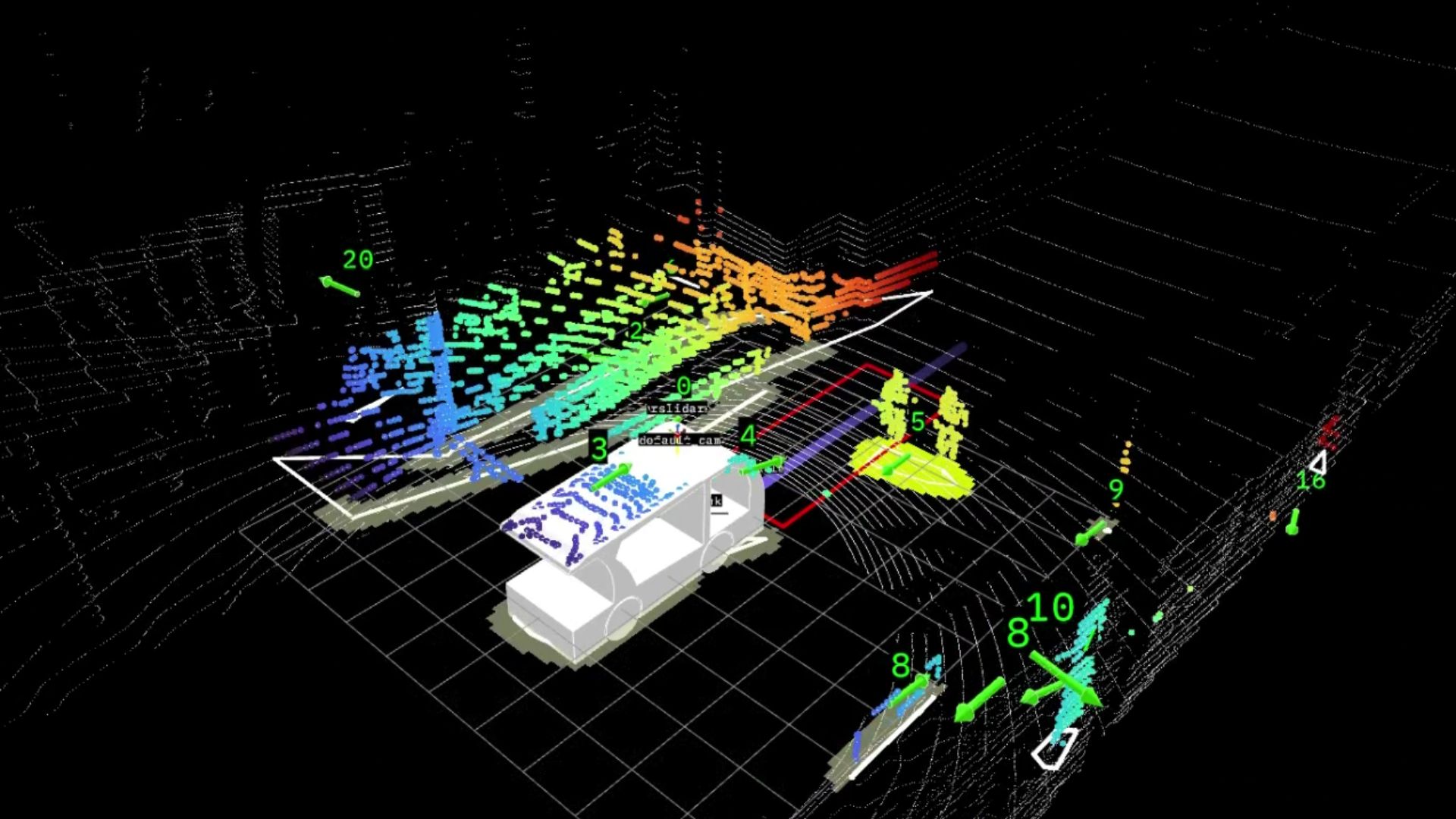
LiDAR–Camera Fusion objects detection
Real-time 3D detection system fusing LiDAR point clouds with monocular camera detections for accurate object localization.
About Me
I am a Computer Vision Software Engineer and Autonomous Vehicle Researcher passionate about developing and designing intelligent systems that integrate perception, predictive control, sensor fusion, and deep learning. I enjoy building cohesive robotics and computer vision stacks where sensing, decision-making, and motion intertwine seamlessly. Beyond development, I love creating my own tools — from synthetic data engines, deep learning models, communication systems, and visualization platforms to custom full-stack frameworks that accelerate experimentation and deployment. I am passionate about continuously learning new things, sharing knowledge with my peers and collaborators, and applying them in real-world settings.




Experience

Resonac, AMI International
Computer Vision Software Engineer
Oct 2024 – Present
- •Developed and deployed computer vision solutions for the steelmaking and mining industries, utilizing deep learning models, image processing, and video analysis for object detection, segmentation, pose estimation, and real-time tracking.
- •Led the development and deployment of a computer vision-based pose estimation system to enhance safety and efficiency in ladle-crane operations within steel manufacturing facilities.

Limser Cranes
Software Developer
Oct 2023 – May 2024
- •Developed and implemented sensor fusion algorithms combining Lidar and camera data for real-time obstacle detection on a 90-ton autonomous transfer vehicle in industrial environments.
- •Designed a Lidar and fiducial marker mapping and localization framework for transfer vehicle navigation in steelmaking mills.
Formal Education

Tecnológico de Monterrey
Robotics and Digital System Engineering B.Eng.
Aug 2020 – Jun 2024
GPA: 95.6/100
Relevant coursework: Intelligent robotics implementation, Embedded System and Programmable Logic Design, Internet of things.